概况
物体检测通常的做法是选出一定数目的候选框,然后针对候选框做图像识别。候选框的选择有以下几种算法:
- sideing window 滑窗:传统做法是设定一些框,在图片上不断滑动,得到候选窗,所以一张图片有可能选出的候选框达\( 10^4-10^7 \)个之多。
- detection proposals:由于滑窗的计算量很大,就有了detection proposals这一类算法,一般认为可能为物体的区域与背景有明显的特征差异,我们尽可能选出可能是物体的那些框的
detection proposals分类
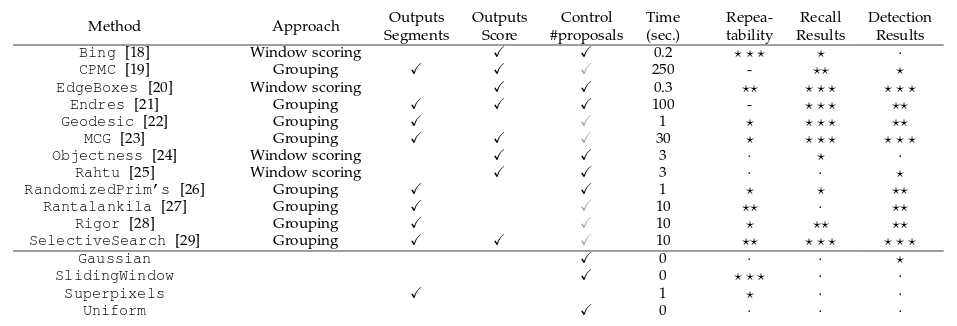
(文中只考虑有开源代码的方法)
- Grouping proposal methods: 将图片分割成小块然后聚合多个可能含有物体的候选区域。根据生成候选区域的方法,可以分成三类:
- grouping superpixels (SP, 聚合superpixels): SelectiveSearch, RandomizedPrim’s, Rantalankila, Chang,
- graph cut (GC,使用不同种子然后graph cut): CPMC, Endres, Rigor
- edge contours (EC,根据边缘轮廓提取区域): Geodesic, MCG
- Window scoring methods: 根据候选框含有物体的可能性给每一个框打分,这种方法只返回bounding boxes,速度更快,但是位置信息没有那么准确。有下面几种实现: Objectness, Rahtu, Bing, EdgeBoxes, Feng, Zhang, RandomizedSeeds
- 其他 proposal methods: ShapeSharing, Multibox(神经网络学习)
- 对比的baseline方法: Uniform, Gaussian, SlidingWindow, Superpixels
其中一些算法介绍:
- SelectiveSearch: 通过合并superpixels生成候选框。需要自定义特征和合并条件。目前RCNN系列都采用了这种方式。
- 解释以下superpixels,superpixels可以理解为将一张图片分割成比像素更大的一个个小块。例如下面的这张图片分割,图c是将原图a分割成200个superpixels结果:
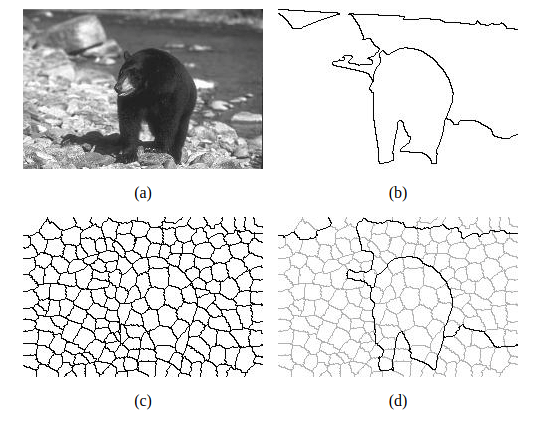
- 解释以下superpixels,superpixels可以理解为将一张图片分割成比像素更大的一个个小块。例如下面的这张图片分割,图c是将原图a分割成200个superpixels结果:
- Objectness: 较早的一种proposal方法。是根据图像中比较突出的位置选择一些初始框,然后根据选中区域的颜色,边缘,位置,大小等特征打分。
- Bing: 训练了一个简单的线性分类器来通过类似滑窗的方式来过滤候选框,速度惊人地快,在CPU上能够达到ms级别。
- EdgeBoxes: 不需要学习参数,结合滑窗,通过计算窗口内边缘个数进行打分,最后排序。
- MCG: generates hierarch- ical segmentations
- Rigor: computes multiple graph cut segmentations,
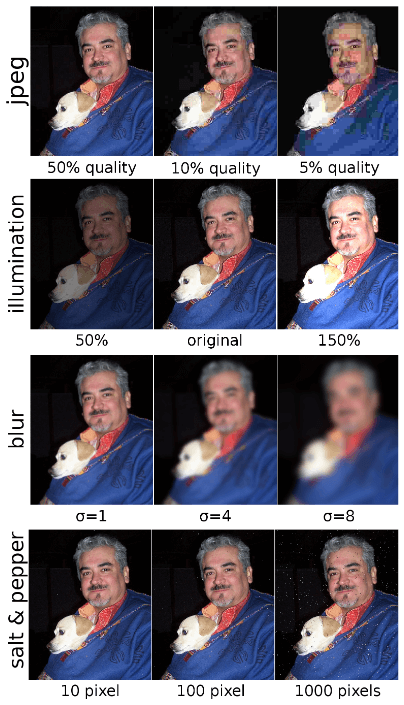
评价一:结果复现的鲁棒性repeatability
好算法应该有比较好的复现能力,对相似的图片提取结果具有一致性的。验证的方法是对PASCAL的图片做了各种扰动(如下图),然后看还能检测出来相同的object的recall是多少,根据IoU的严格与否能够得到一条曲线,最后计算曲线下面积得到repeatability。
评价二:是否会漏检recall
这里有三种评价方式:
- 固定proposal数量,根据不同IoU值计算recall
- 固定IoU阈值,根据不同的proposal数量计算recall
- 结果:MCG, EdgeBox,SelectiveSearch, Rigor和Geodesic最好。
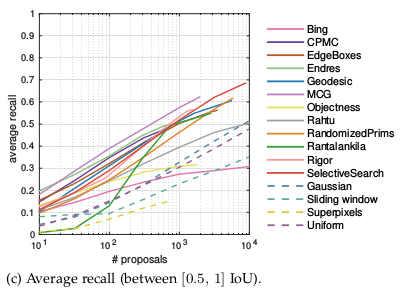
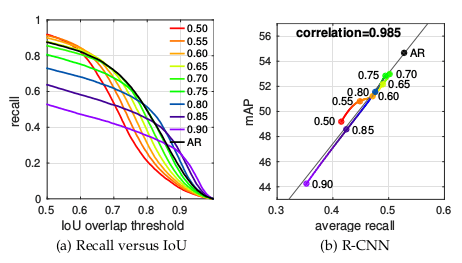
- 文中新定义的average recall (AR),根据在IoU为0.5-1之间proposal数量计算recall
- 结果:
- MCG在各种proposal下表现最好
- proposal小于1000时,endres和CPMC效果都比较好
- proposal大于1000时,Rigor和SelectiveSearch表现更好
- 结果:
评价三:用于物体检测时效果
- 检验算法在物体检查中的效果
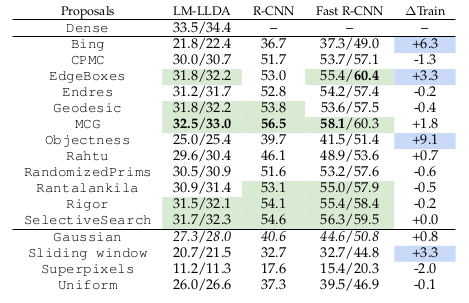
使用各种算法得到1000个proposal然后用DPM(LM-LLDA)和RCNN和FastRCNN的物体检测效果评价算法
- 从下面结果看出,IoU越大,物体检测效果越好,所以提高定位能够提高最终效果。
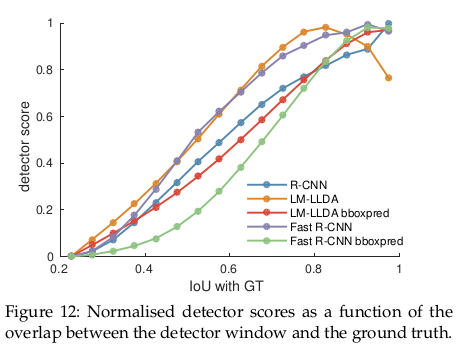
- 在LM-LLDA和RCNN中表现最好的前五个比较类似,都有MCG,SelectiveSearch,Rigor
- 从下面结果看出,IoU越大,物体检测效果越好,所以提高定位能够提高最终效果。
- 验证了AR和mAP相关后可以用AR结果对proposal算法进行微调。
结合AR结果,为EdgeBoxes选择更好的参数可以在物体检测中得到1.6个点的提升
最后结论
- 目前为止repeatability不是评价proposal方法的一个重要指标,因为表现好的算法例如Bing在后面的检测效果中并不如repeatability表现的差的SelectiveSearch和EdgeBoxes。
- 定位越准(IoU越大)的proposal方法在物体检测中效果越好。所以不是IoU0.5效果就会好。
- SelectiveSearch,Rigor,MCG和EdgeBoxes在物体检测表现更好,而且各自的效果差不多。其中EdgeBoxes在速度和结果上表现都不错。
总结完我打算再接下来的项目中用用SelectiveSearch和EdgeBoxes,还有Faster RCNN里面的archer方法,下回继续。
Reference
- What makes for effective detection proposals?
- superpixels
- BING: Binarized Normed Gradients for Objectness Estimation at 300fps
- blog.csdn.net/baobei0112/article/details/47950963